Kafka cluster load balancing using Cruise Control
You can use Cruise Control as a load balancing component in large Kafka installations to automatically balance the partitions based on specific conditions for your deployment. The elements in the Cruise Control architecture are responsible for different parts of the rebalancing process that uses Kafka metrics and optimization goals.
Load Monitor
Generates a cluster workload model based on standard Kafka metrics and resource metrics to utilize disk, CPU, bytes-in rate, and bytes-out rate. Feeds the cluster model into Anomaly Detector and Analyzer.
Analyzer
Generates optimization proposals based on optimization goals provided by the user, and cluster workload model from Load Monitor. Hard goals and soft goals can be set. Hard goals must be fulfilled, while soft goals can be left unfulfilled if hard goals are reached. The optimization fails if the hard goal is violated by optimization results.
Anomaly Detector
- Broker failure
- Goal violations
- Disk failure
- Slow broker as Metric Anomaly
- Topic replication factor
Executor
Carries out the optimization proposals and it can be safely interrupted when executing proposals. The executions are always resource-aware processes.
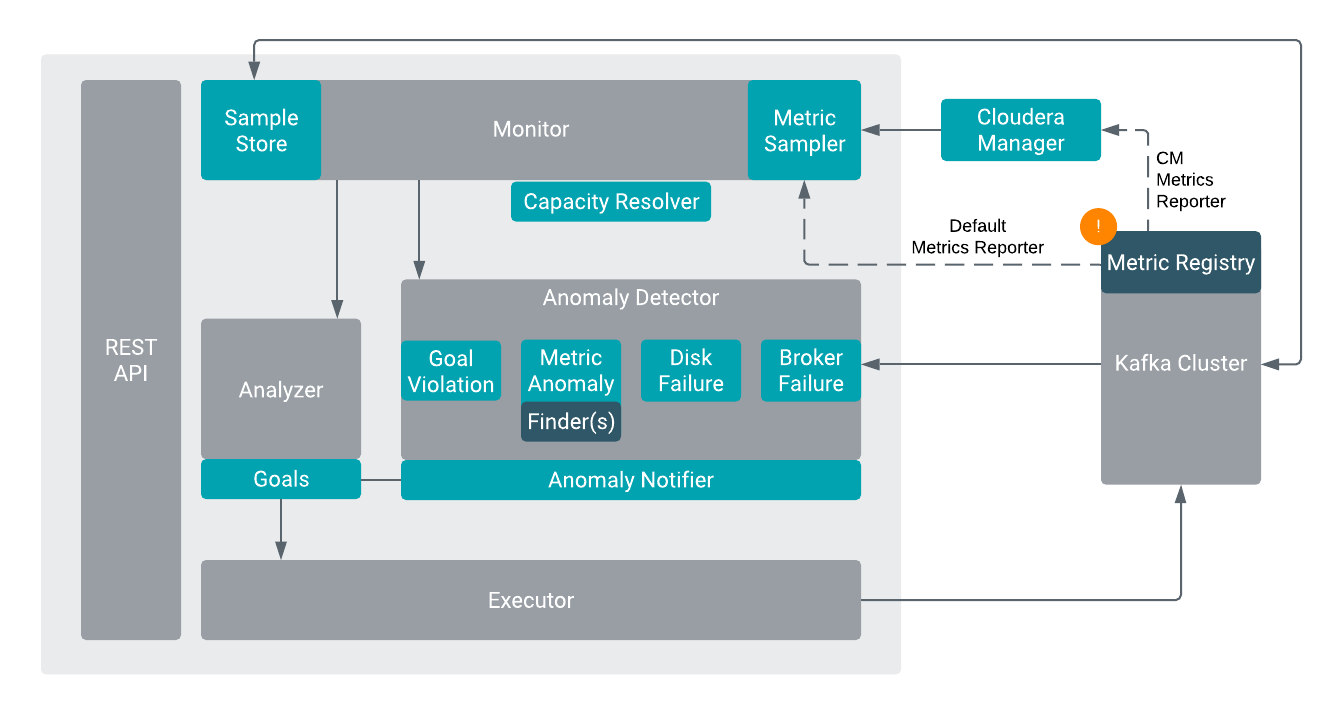
How Cruise Control retrieves metrics
Cruise Control creates metric samples using the retrieved raw metrics from Kafka. The metric samples are used to set up the cluster workload model for the Load Monitor. When deploying Cruise Control in a CDP environment, you can use Cloudera Manager or the default Metrics Reporter of Cruise Control to execute the process of retrieving the metrics.
In Load Monitor, the Metric Fetcher Manager is responsible for coordinating all the sampling tasks: the Metric Sampling Task, the Bootstrap Task, and the Linear Model Training Task.
Each sampling task is carried out by a configured number of Metric Fetcher threads. Each Metric Fetcher thread uses a pluggable Metric Sampler to fetch samples. Each Metric Fetcher is assigned with a few partitions in the cluster to get the samples. The metric samples are organized by the Metric Sample Aggregator that puts each metric sample into a workload snapshot according to the timestamp of a metric sample.
The cluster workload model is the primary output of the Load Monitor. The cluster workload model reflects the current replica assignment of the cluster and provides interfaces to move partitions or replicas. These interfaces are used by the Analyzer to generate optimization solutions.
The Sample Store stores the metric and training samples for future use.
With the metric sampler, you can deploy Cruise Control to various environments and work with the existing metric system.
When you use Cruise Control in the Cloudera environment, you have the option to choose between
Cloudera Manager and Cruise Control Metrics Reporter. When using Cloudera Manager,
HttpMetricsReporter reports metrics to the Cloudera Manager time-series
database. As a result, the Kafka metrics can be read using Cloudera Manager.
When using the default Metrics Reporter in Cruise Control, raw metrics are produced directly to
a Kafka topic by CruiseControlMetricsReporter. Then these metrics are fetched by
Cruise Control and metric samples are created and stored back to Kafka. The samples are used as
the building blocks of cluster models.
How Cruise Control rebalancing works
For the rebalancing process, Cruise Control creates a workload model based on the resources of the cluster, such as CPU, disk and network load, also known as capacity estimates. This workload model will be the foundation of the optimization proposal to rebalance the Kafka cluster, which can be further customized for your requirements using optimization goals.
During the rebalancing operation, the Kafka brokers are checked to determine if they met the requirements set by the selected goals. If the goals are fulfilled, the rebalancing process is not triggered. If a goal is not fulfilled, the rebalancing process is triggered, and partitions, replicas and topics are reassigned between the brokers until the requirements set by the goal are met. The rebalancing fails in case the hard goals are not met at the end of the reassignment process.
- Hard goals
-
- List of goals that any optimization proposal must fulfill. If the selected hard goals are not met, the rebalancing process fails.
- Default goals
-
- Default goals are used to pre-compute optimization proposals that can be applied regardless of any anomalies. These default goal settings on a healthy cluster can optimize resource utilization if self-healing goals are not specified.
- The value of the Default goals must be a subset of the Supported goals, and a superset of the Hard and Self-healing goals.
- If there are no goals specified as query parameters, the Default goals will be used for the rebalancing process.
- Supported goals
-
- List of supported goals to assist the optimized rebalancing process.
When the hard, default and supported goals are fulfilled, the rebalancing is successful. If there are any goal violations, self-healing can be used.
- Self-healing goals
-
- List of goals to be used for self-healing relevant anomalies. If there are no self-healing goals defined, the Default goals are used for self-healing.
- If the rebalancing process is triggered by self-healing and the Self-healing goals list is not empty, then the Self-healing goals will be used to create the optimization proposal instead of the Default goals.
- The value of the Self-healing goals must be a subset of the Supported goals and a superset of the Hard goals.
- Anomaly detection goals
-
- List of goals that the Anomaly detector should detect if violated. It must be a subset of the self-healing goals and thus also of Default goals.
- The value of the Anomaly detection goals must be a subset of the Self-healing goals. Otherwise, the self-healing process is not able to resolve the goal violation anomaly.
Cruise Control has an anomaly detection feature where goal violations can also be set. The Anomaly detection goals configuration defines when the goals are not met, thus causing a violation. These anomalies can be fixed by the proposal generated from the Self-healing goal configuration. In case there is no self-healing goal specified, Cruise Control uses the Default goals setting. Hard goals can also be set to guarantee the fulfillment of any optimization or self-healing process.
How Cruise Control self-healing works
The Anomaly detector is responsible for the self-healing feature of Cruise Control. When self-healing is enabled in Cruise Control, the detected anomalies can trigger the attempt to automatically fix certain types of failure such as broker failure, disk failure, goal violations and other anomalies.
- Broker failures
- The anomaly is detected when a non-empty broker crashes or when a broker is removed from a cluster. This results in offline replicas and under-replicated partitions.
- Goal violations
- The anomaly is detected when an optimization goal is violated.
- Disk failure
- The anomaly is detected when one of the non-empty disks dies.
- Slow broker
- The anomaly is detected when based on the configured thresholds, a broker is identified as a slow broker.
- Topic replication factor
- The anomaly is detected when a topic partition does not have the desired replication factor.