
Kafka cluster load balancing using Cruise Control
You can use Cruise Control as a load balancing component in large Kafka installations to automatically balance the partitions based on specific conditions for your deployment. The elements in the Cruise Control architecture are responsible for different parts of the rebalancing process that uses Kafka metrics and optimization goals.
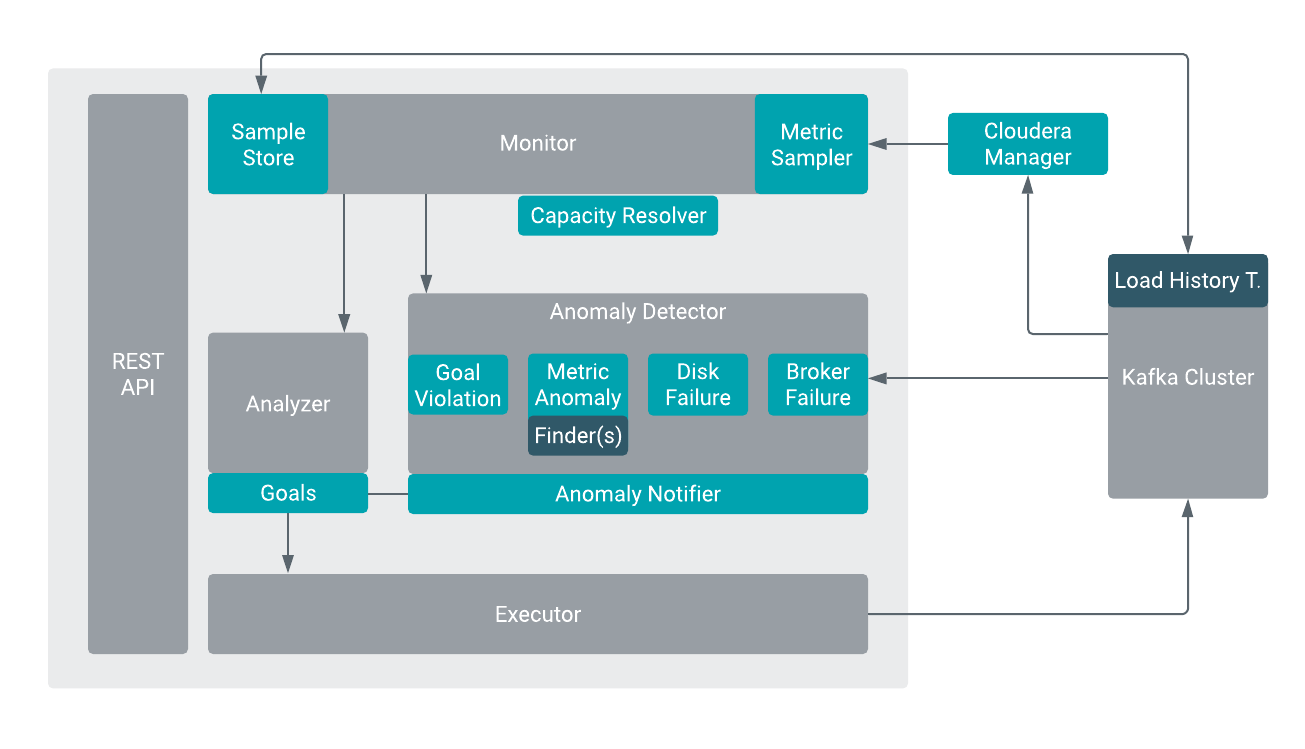
Load Monitor
Generates a cluster workload model based on standard Kafka metrics and resource metrics to utilize disk, CPU, bytes-in rate, and bytes-out rate. Feeds the cluster model into Anomaly Detector and Analyzer.
Analyzer
Generates optimization proposals based on optimization goals provided by the user, and cluster workload model from Load Monitor. Hard goals and soft goals can be set. Hard goals must be fulfilled, while soft goals can be left unfulfilled if hard goals are reached. The optimization fails if the hard goal is violated by optimization results.
Anomaly Detector
- Broker failure
- Goal violations
- Disk failure
- Slow broker as Metric Anomaly
- Topic replication factor
Executor
Carries out the optimization proposals and it can be safely interrupted when executing proposals. The executions are always resource-aware processes.
